

全長 690mm
全幅 345mm
全高 135mm
重量 3430g (かわロボ時)
腕機構 4節リンク機構
足機構 スライダークランク機構
大会参加結果
予選トーナメント本戦
第1回戦 カワセミ 敗北
予選トーナメント敗者復活戦
第1回戦 マクシーム 敗北
機体解説
そもそもの機体コンセプトは、設計が一年目であることもあり、信頼性や安定性、整備性の高い機体を目指していたため、できるだけ普遍的な機構で全体を構成することに終始した。名前の避弾経始とは装甲を傾斜させる事により、相手の攻撃を分散させ、逸らして弾くという概念のことで、その名の通りにこの機体は前方に傾斜の緩やかな装甲を配置している。大して意味はなかったが…。
脚機構
片側で2つのモーター、計4発のモーターで動作する。脚は大きいほうが良いと聞いていたので、できる限り大きくした。それはもう大きくした。そのため、脚は前後幅が140mm程度と大きく、走破性が高くなっている。大きな脚は別にいいのだが、やはりクランクは信頼性が低いように感じるので、今後はカムでの設計も視野に入れたい。余談だが、脚とアームはモジュール化されており、5つのねじを外すだけで分離可能、加えて、脚部フレームが全て共通なので、予備フレームが1つで済むようになっている。よって、かなり整備は楽だと思われる。
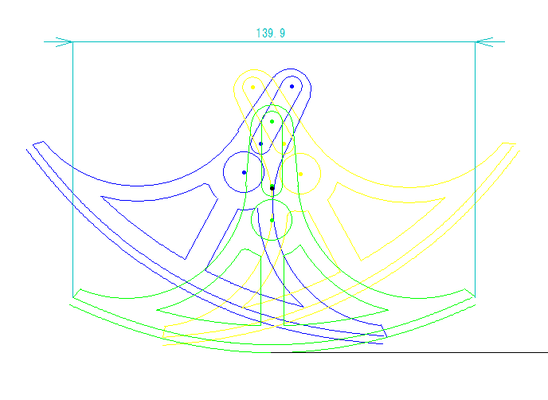
腕機構
腕機構はマブチモータ380を4つにギヤ比200程度のギヤボックスにつなげて使用した。アームは転倒復帰が可能な良くある四節リンクとなっている。一応先端部の交換によりロッド機体にすることもできるのだが、面倒なので作らなかった。ギアボックスの歯車がピニオン以外は全て自作だったが、特に問題はなかった。しかし、軸間距離を間違えていたので、最初は思うように動かず、苦労した。また、モーターが4発であるのに、バッテリーがニッケル水素では放電能力が足りていないようなので、決定打になるほどの出力が出せなかった。今後はlifeバッテリーを採用したい。
最後に
余裕のある感じに作業しながら、直前まで動かなかったり、アームの軸を折ったりと、かなりいろんなことをやらかした気がする。なにより、うまく作業を分担できずに暇ばかりさせてしまった班員の皆、問題をどうにかするためのアドバイスをもらった先輩方やほかのロボ班の方々本当にありがとうございました。来年は練習走行会に行って、ガンガン動かせるように、計画的に作業をするようにします。絶対。