
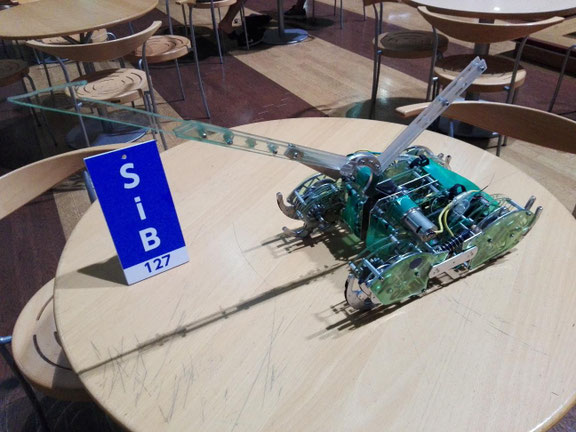
SiB
[幅]240mm
[奥行]350mm
[全高]490mm
[アーム機構]ヘッケン機構
[脚機構] ヘッケン機構
[名前の由来]
Simple is Beautiful.
Simpleとは何かを追い求める機体である.
[戦績]
・第25回かわさきロボット競技大会
第1回戦敗退
・第25回かわさきロボット競技大会 敗者復活戦
第2回戦敗退
・KHK杯 2018
第1回戦敗退
・ヤガボット2018
第2回戦敗退
[説明]
1. アーム
機構: ヘッケンリンク機構
ギア比: 150:1
モーター: 4個
バッテリー:ZIPPY 9.9V 2100mA(アーム脚共用)
アームが少し長いため,相手機体の不安定な部分を捉えないと倒せない.短くしても良かったが,持ち上げられないことはなかったため,威嚇の意味も兼ねてそのままにした.支点を作成しようとしたが,丈夫で安定性のあるものが作成できなかったので今回は取り付けなかった.
また,アームはばねを用いた二段で構成している.根本側のアームの形状に,上に凸の半円を導入することで障害物に乗り上げているときでも地面を捉えるようにしている.

アーム機構が中心よりも後ろに位置してしまい,アーム軌道が中心よりも後ろに行かなくなってしまった.そのため,復帰補助装置を取り付けた.

2. 脚
機構: ヘッケンリンク機構
ギア比: 16:1
モーター: 4個
バッテリー:ZIPPY 9.9V 2100mA(アーム脚共用)
機動性は良好.サスペンションもうまく作用しており,問題なく障害物を乗り越えられる上に,速い.しかし,前脚に負荷がかかるようで,脚本体が歪むことがあった.一枚板から作成する必要があるだろう.
脚のヘッケンリンクは,試行錯誤の末にようやく実用的なものを作成することができた.
制作中の問題点は以下の2点であった.
(i)固くて動かない
クランクの歪み及び脚本体の歪みによる干渉が原因であった.
やすり,クランク間の距離を一定に保つことで調整した.
(ii)旋回できない
レバーが傾くと動作しなくなる.
MDFで作成したスペーサ―を詰めることで解決した.
また,後退が速すぎるので,ヒットアンドアウェイするときにリング外に出ないように気を付けなければならない.特に,障害物から降りながら後退するときに起こる.

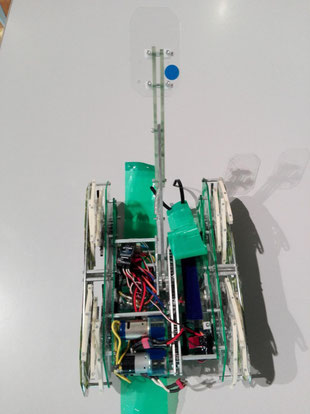
初めてサスペンションを導入してみた.
前後脚を可動にして,その間にタミヤのサスペンションを配置した.
前脚の可動域は±5°後脚は適当である.当初,安定性を求めて後脚を固定しようとしたが,割とうまくいったので可動にした.
ダンパー液をタミヤのダンパーオイルの粘性の最も高いものにし,ばねもより剛性の高いものに換装したところ,より強く地面を捉えるようになった.
