

Golyat Ausf.B
[幅]245mm
[奥行]350mm
[全高]490mm
[脚機構] リンク機構
[名前の由来]
軽爆薬運搬車輌ゴリアテをモチーフにしたから.
Golyatシリーズの改良型機体である.
[戦績]
・第25回かわさきロボット競技大会
第2回戦敗退
・第25回かわさきロボット競技大会 敗者復活戦
第4回戦敗退
・KHK杯 2018
第2回戦敗退
・ヤガボット2018
第1回戦敗退
[説明]
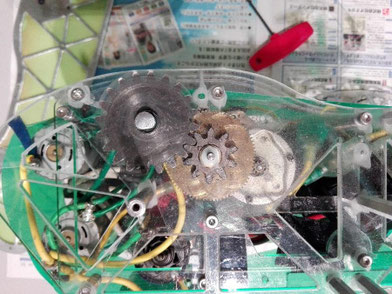
1. アーム
機構: ヘッケンリンク機構
ギア比: 300:1
モーター: 4個
バッテリー:ROVOLT 9.9V 1500mA
Golyatシリーズ初期のままである.
ギアボを4つも用いる上,レバーの揺動との干渉を考慮して遊び歯車を3つ入れている.そのため,伝達効率が悪い.しかし,9.9VのLi-Feバッテリーを使用することでパワー不足をカバーした.
先端にフライ返しくらいのシールドを設置した.これにより相手機体のアームの下に入り込みやすくした.威嚇にもなるので有効であった.
アーム先端の接地については改良の余地がある.リングの平坦な所では接地できるが,障害物に乗り上げた際に設置できないという問題がある.アームはばねを用いた二段で構成させている.ストッパーの部分をもう少し上げれば,先端は今の最下点より下になる.これを実現するためには,ストッパーが根本のアームと衝突する部分の形状を上に凸にすれば良いだろう.

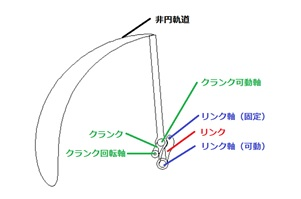
2. 脚
機構: スライダリンク機構
ギア比: 16:1
モーター: 4個
バッテリー:ROVOLT 9.9V 2400mA
Golyatシリーズ初期のままである.

各脚に動力源を分配した.従来は左右で2個ずつのモーターを使用していたが,1つの脚に1つのモーターが対応するようにした.これにより,片側の脚が全く動けなくなる状態にならないようにした.
結局,反転時の走行を試合で使うことはなかったのだが……
また,外部装甲の面積が大きいと横転しやすくなるため,装甲の小型化を図った.
