

Apoda
全長1415mm (アーム展開時)、 360mm(アーム収納時)、 250mm(ボディ収納時)
全幅350mm
全高200mm
脚機構 ヘッケン
機体解説
(パチーン)
話をしよう、
あれは今から36万・・・
いや、1年前だったか
まあいい
私にとってはつい昨日の出来事だが、
君たちにとってはたぶん
明日の出来事だ
彼には72通りのロボット案があるから
なんて言えば良いのか・・・
たしか最初の案は・・・
「尺取り虫形ロボット」
そう
あいつは最初から言うことを
聞かなかった
私の言うとおりにしていればな・・・
まあ、良いヤツだったよ
そんな機体案で大丈夫か?
-大丈夫だ、問題ない
~(なんかいい感じの音楽)♪~
-某H氏は言っている、お前は勝ちに行く機体を作る運命ではないと-
そんなアーム案で大丈夫か?
-一番良いのを頼む
-某H氏は言っている、一巻きのアームに意味は無いと-
やぁ。私の設計図が心配なのか?
ダメなんじゃないかな?
UやAやYもよくやってくれるしね
-いや、君の頼みは断れないよ
-班長は絶対だからね
班長、部員が持つ絶対の権限-
-それは班員の作業を設計に応じて増やしていくことだ
お前達は機体の完成までやるべき作業を自由に選択していけない
-さぁ、いこう
-アア、ハンチョウ、ワタシノカワイイハンインガカナシミニミチテイマス
イキナサイアナタタチ。アポーダノカタキヲトルノデス!
-ああ、やっぱり今回もダメだったよ。あいつは話を聞かないからな。
そうだな、次は先輩も巻き込んで付き合ってもらうよ
脚機構
脚自体は120度位相のヘッケンリンク。
胴体機構
今回のロボットは尺取り虫のように折り曲がることによってかわロボの規定サイズ内に収めることを目指したため胴体内にルールに触れない範囲で折り曲がり機構を詰め込み、それをそのままアームの上下動に用いた。
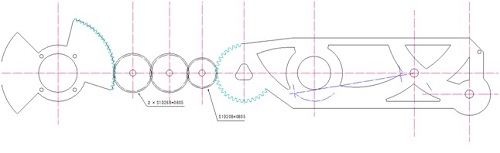
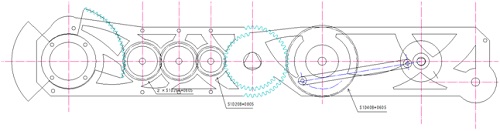
第2階層のパーツの組み合わせでアームの上下動を行う。一番右端のギヤにモータによる動力伝達が行われ右端から2番めのギヤがちょうど90度回転する、それにより歯の掘ってあるフレームが90度曲がる。それと同期して第1階層のフレームが、右のフレームがモータ側に固定されているので左から4つ目のギヤが連動して回転しギヤトレインで伝達し最後のパーツでギヤ比による45度回転を作る。こうすることによって機体が曲がりながら脚の地面に対する角度は常に一定に保たれる。
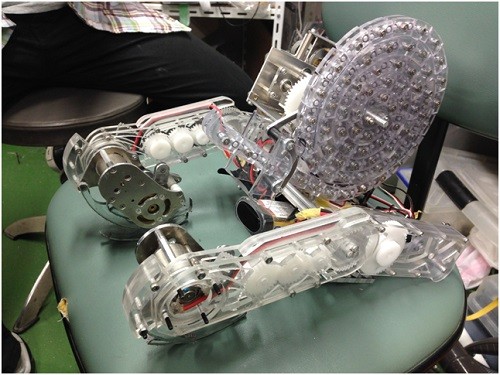
また、脚ユニットのモータが常に動くことから上図には描いてないが写真を見てもらうと分かる通り足側のフレームの上に脚ユニットのモータの配線を通す穴を作った。
配線がその通り道で引っかかり断線の可能性も危惧したが今のところ大丈夫なようだ。
今回の機体では掘り出した板同士をスペーサで固定するのではなく邪魔にならない範囲でそのスペーサ分フレームを掘り、重ねあわせ、ウエハース状に重ねることによって密閉したフレームにできた。(横方向の肉抜きに寄る穴は無視するとして)
実験的な機体であったがために総重量の心配もありポリカーボネイト中心のフレームにポム系のギヤを中心に使っており強度に対して不安が残ったが今のところ無事である。ただモジュールは1よりも2あたりにしておけば良かったと反省。
・おまけ
本来は左右の脚が別々の動きができるように設計をしていたのだがチャンネル数不足、予算不足、時間不足等の要因が重なって現実には相成らなかった。なので機体の折り曲げ中心を3本の軸を束ねることによって左右の脚の同期を補助している。
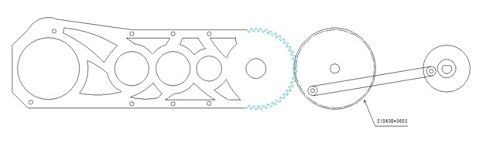
アーム機構
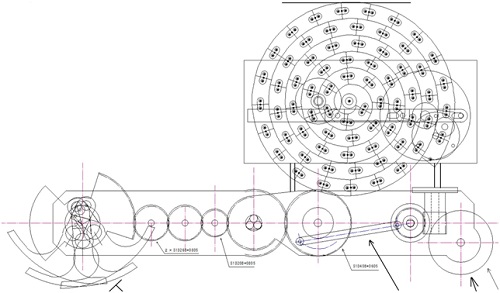
今回はより長いアームを小さなスペースで収めるという計画だったので巻き取り形のアームを考えた。当初の案では一巻きの予定だったが誰かさんに「え?ww巻き取りアームなのにwwww1巻きしかないの?wwwwwwww」と煽られたのでアルキメデスの螺旋を用いた渦巻状のアームを作った。そのためそれぞれのパーツは同じように見えるが実際は1個1個かなり違うので組み立てる順番を間違えると死ぬ
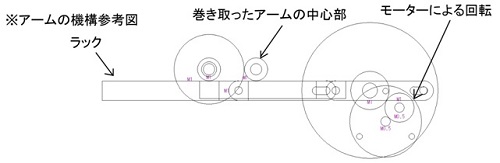
アームの巻取りに関してはモータから直接回転を取り入れるのではなく、途中にラックとピニオンを挟むことによってモータからの無限回転をスレイダーリンク機構により直線運動にし、それをラックとピニオンにより回転運動に変換した
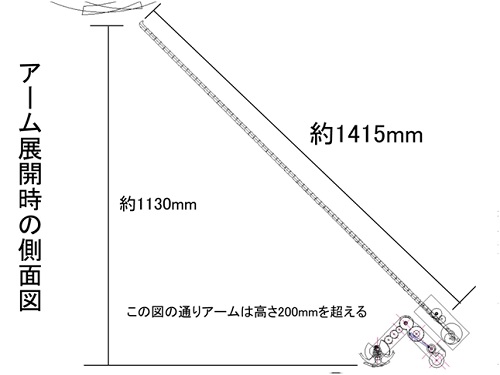
アームは完全に伸びきれば全長1415mmまで伸びる。(ちなみに西暦1415年はアジャンクールの戦いが行われた年でその後のイギリス、フランスの関係に影響を及ぼした戦いであった)
実際はアームの自重によるたわみや、トルク不足等の要因により全て伸びきることはできなかったが良い勉強になった。本番ではアームの展開の回転をサポートするガイドが不十分だったため後方にアームの一部が飛び出る事故が起きてしまった。その後、ガイトを付け直し別の試合に挑んだが今度は過大なトルクによる(380モータのギヤ比3000対1、それでも足りなかったが)軸がネジ切れる事故が起きた。
今後作るとしたならばより強度のある軸、例えばステンレス製の軸などの加工が容易にできる環境にて制作してみたい。ただ自重によるたわみの矯正は難しい課題としてまだ残っている。
まとめ
ぶっちゃけデザイン賞を狙っていたのだが今回は個性的な機体が多く、かつしっかりと動くものが多かった。今後は戦いに行ける前提で、かつカッコ良い機体をつくりたいなと思う今日このごろ。