
【なまえ】 カワセミ
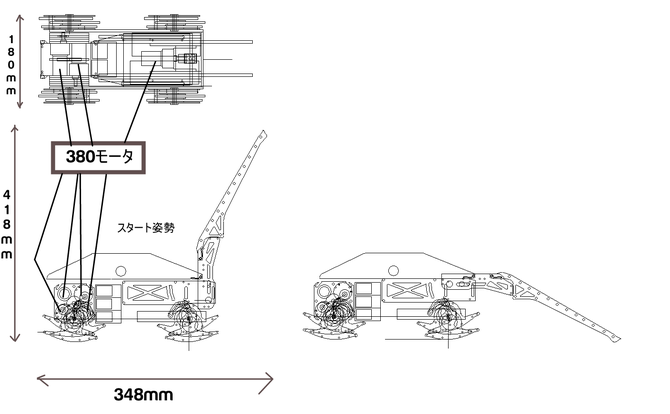
【ぜんちょう】 348mm
【ぜんぷく】 180mm
【おもさ】 3500g
【あしきこう】 ヘッケンリンク さんまい
今年の機体のコンセプトとして、
・こわれにくい
・整備性の向上
・確実に動く機構を取り入れる
というのを念頭に置き、設計した。
まず、機体を壊れにくくするために去年のような複雑な構造をやめ、単純な構造を目指した。
・機体腹部分にベースとなるシャーシに該当する板材を用意し、脚モーターは一箇所に集中的に設置。こうすることによって整備性も向上した。
・垂直に交わる箇所は垂直スペーサのみでは不十分と判断し一方に穴を開けそこに垂直に交わるフレームを差し込むなどを行い全体の強度を増した。これは回転系のアームを用いる人がフレーム強度増すために行う構造を参考にした。
・先にも言ったとおり脚に用いるモータをお尻の方に集中させ、2次元加工したフレームを何枚も重ねることによって一つのモータボックスを作った。前輪へはタイミングベルトを用いた。
脚機構
脚機構は120度位相ヘッケンリンクを採用した。
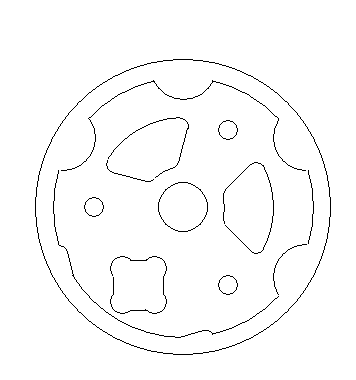
図1.クランク円盤
図1のようなクランク円盤を用い、ポリカーボネイト性の脚を挟んだ。実際の脚の写真は写真1を参照。

写真1.脚
写真1を見て分かる通りクランクの回転中心が3枚とも1本の四角柱で貫通できるようにしてある。これは整備性の向上の目論見とともにクランクスラスト方面の荷重にも安定して耐えられるであろうと考えて設計した。また、クランク円盤で挟む性質上脚1枚あたりの厚みが実際には4*2の8mm相当になり重量と引き換えに脚の問題によく挙げられる「かたつき」軽減に一役買ったと見れる。
また、ヘッケンリンクにつきもののレバーも上記同様の理由で厚くなってしまった。流石にレバーにまで重量を割くことが出来ないためレバー自体は4mm厚のパーツを1mm厚のアルミで挟む形にした。4mm厚のアルミを間に挟んだのには1mm厚のアルミ板にネジを来ることが不可能だったため、2つの1mm厚レバーを固定するために4mm厚のアルミにネジを切り、固定した。写真1を見て分かる通り片方には1個の皿ネジしかついていないが、これはスペースの関係上、こうせざるを得なかった。しかし、レバーの回転中心とネジの2箇所で固定ができているため分裂の心配はなかった。
腕機構
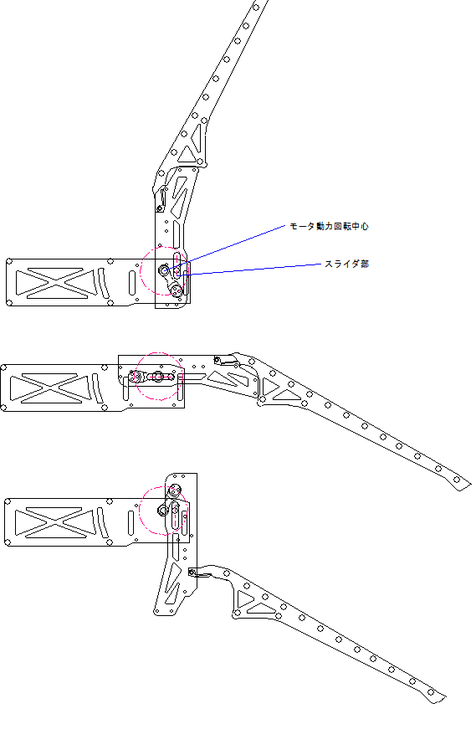
図2.アーム姿勢3種
腕機構については特筆するようなことは無いくらいシンプルなもの。アーム先端が曲がるようになっていて地面に設置した場合や相手のアームで弾き飛ばされた時に機体が浮かないようになっている。逆に言うとシールドなのに抑えこみが出来ないのである。ついでに写真も乗っける。

写真2.アーム