
初号機
全長 約356[mm]
全幅 約248[mm]
全高 約250[mm]
重量 約3000[g]
腕機構 ロッドアーム一本
脚機構 スライダークランク機構
大会参加結果
第20回かわさきロボット競技大会
実機審査会からスタート
第20回かわさきロボット競技大会バトルロボット部門出場
予選トーナメントからのスタート
予選トーナメント本選
第一回戦 ピュアサラブレッド 敗北
予選トーナメント敗者復活戦
第一回戦 August003 不戦勝
第二回戦 無し
第三回戦 燠火 敗北
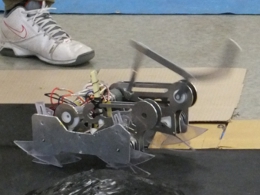
機体解説
モーターは脚に二つ、アームに一つの計三つ。バッテリーは一本使用。
先輩が去年作った機体「ハヤブサ」を流用している。
そのため、アームには10対1のギアボックスをそのまま使用しておりロッドアームとしては異様な速度で動く。
また、設計段階では反対側に動力無しのアームを付け、スペーサーとネジで動力有りとつなぐ予定だったが間に合わせる事ができなかった。
肝心の能力に関しては、まともに試合で使用したのが一度だけのため、いまいち分からない。
ギアもそのまま流用しているため、全てポリアセタールを使用。
ただし、右のモーターにつながるギアのみ新しくした。固定方法も同様で、ギアボックスの軸にイモネジを使って止めた。
完成した段階では持ち上げた状態で足を回したため特に問題なく動いたのだが、
実際に走らせようとすると自重による負荷で右側のギアボックスの軸とギアが滑り、上手く動かない時があった。
一応、試合においては何とか動いてはいたがあと少し動かしていたら完全に右側の脚は動かなくなっていたと思われる。
この空回りの原因としては、新しくしたギアが元々のギアと穴の大きさに違いがあり、
軸の固定のために穴に完全に嵌るスペーサーを使ったためである。
このスペーサーはそのままではギアボックスの軸が入らないため穴を広げる必要があり、その精度に問題があったため、かなり強引に軸を固定していた。
全長が少し規定オーバーしてしまったために急遽、無理矢理後ろ足を使って立たせてのスタートをすることになってしまった。
全くそんなことは考慮していない脚だったが、奇跡的に立たせることができた。
しかし、スタートの練習を全くしていなかったために初戦ではスタートと同時に後ろに転げ落ちてしまった。
今回、先輩の機体を流用するという事態になってしまったのは自分が設計を全く出来なかったからであり、
また、流用が決まった後の設計や組み立てにおいても先輩にとても多くの協力をしていただくなど反省すべき点の多い大会でした。
今回の失敗を糧に来年は全て自分で設計したロボットで大会に出場できるよう頑張りたいと思います。
最後に、班員の皆さん、先輩方にたくさんのご迷惑のお詫びと様々なご協力のお礼を申し上げます。