
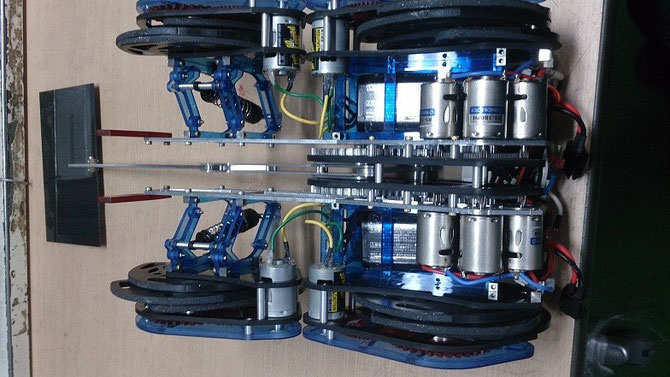
モータは多いほどよい.古事記にもそう書かれている
全長 345mm
全幅 246mm
全高 160mm
機体前端からアーム先端まで 275mm
2015年かわロボ大会後より設計を始めた機体
天霧の機動力と信頼性を向上させたもの
2015年KHK杯に参加する都合上制作期間が少なかったので,フレームにはポリカーボネイトを多用している
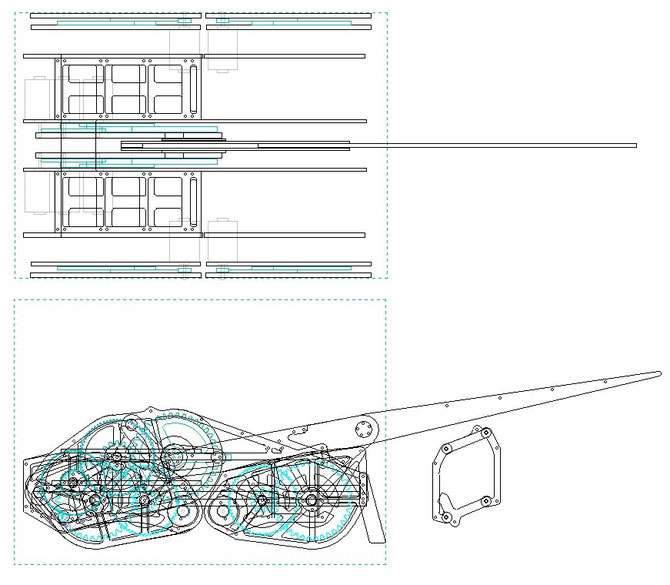
設計図
脚機構
脚機構は90度位相のスライダーヘッケンリンク&カムクランクで,減速比はおおよそ19:1
タミヤスポーツチューン380モーターを4つ使用し,それらをLi-Feバッテリー(13.2V,2200mA)で駆動することにより非常に高い機動力を発揮する…
「HidaΧzer と比べれば劣るかもしれません。」
「ううん…サラマンダーより、ずっとはやい!!」
ポリカーボネイト製の自作ギアで減速し、最終ギヤからカムクランクへ六角スペーサーで回転を伝える.
カムクランクには六角の穴が空いており,六角スペーサーは差し込んであるだけなので,天霧と比較して整備性が大きく向上している.
前脚ユニットはダブルウィッシュボーン式サスペンションで支持されているが,相変わらず重心が端に後ろ寄りなのであまり機能していない

上図は天霧の脚(左)と夕霧の脚(右)の比較.かなり大型化しており走破性が大きく向上したが重量も増加した(天霧は脚1ユニットあたり180g,夕霧は300g).また,脚の接地面の軌跡が真円に近いため,天霧と比べて移動がなめらかになった
ちなみに脚用モーターがマブチではなくタミヤのスポチュンになっているが,これは制作時に諸々の事情によりマブチ380モーターが手に入らなかったため. スポチュンモーターはマブチモーターと比べて高回転数・低トルクといった印象. 適正電圧はマブチと同じく7.2V. これに13.2VのLi-Feがスーッと効いて・・・ これは・・・爆熱仕様・・・
アーム機構
アーム機構は天霧とほぼ同じ4節リンク機構.減速比は100:1
天霧と同じく6つのマブチ380モーターを13.2Vで駆動するためパワーは十二分.減速機構に使うギアは自作で,最終ギアはA2014,モジュール2,厚さ5mm.今のところ欠けなどは見られない.
電装
電装は天霧のものをそのまま流用.軽量化のため冷却ファンはオミット
戦績(2015年10月05日現在)
2015年KHK杯 第3回戦敗退(3勝1敗)
ようやくそれなりに戦える機体に仕上がったといった印象.しかしまだまだ問題点も.
以前横回転アームの機体を作っていたU氏は「サスの部分に横回転アームの鎌がよく刺さりそうだネェgff...」などと話しかけてきたが実際その通りなので困りもの.
「夕霧,君はこの地球上で最も進化したロボットになったんだ.」
「どういうことです?」
「その様子を見ると,なにか大変な欠陥があったようだな.」
「僕にはなにがなんだか…サスも機能しないし!」
「わるいが,治すことはできん.」
「一生このままですか!?」
「申し訳ない…そうだ.
時間がなくて手が回らなかった.」
「早く回転アーム対策しなきゃ…」
「夕霧,そのままの車体じゃ駄目だ.
それでは重量オーバーになってしまう.」
「だけどサスがむき出しなんです!」
「おちつけ.」
「もういい加減にしてください先生!
壁にぶつけてでも軽量化しますよ!
こんなの耐えられない!」
「よく聞け回転アームを克服する方法を教える.
まず”回転アーム”という言葉を思い浮かべる.
そしてゆっくりこう唱えるんだ.”存在しない”と.」
「ロボットのAIの中には恐怖を司る部分が存在する.
ナノロボットがそこに侵入して,君のAI内にある回転アームへの恐怖を削除したんだ.」