
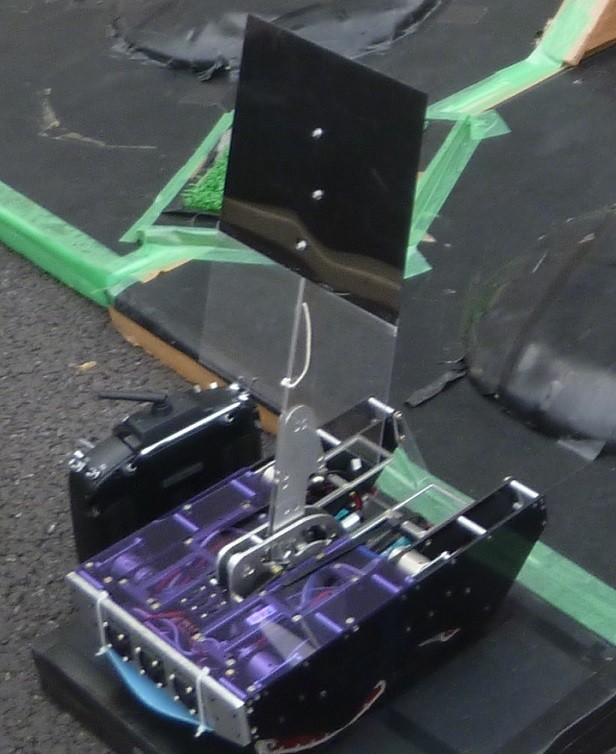
全長 320mm
全幅 248mm
全高 143mm
機体前端からアーム先端まで 270mm
2014年かわロボ大会後より設計を始めた機体
当初は縦回転アームを搭載した機体として設計していたが,ルール変更によりロッド/シールドアームの機体となった
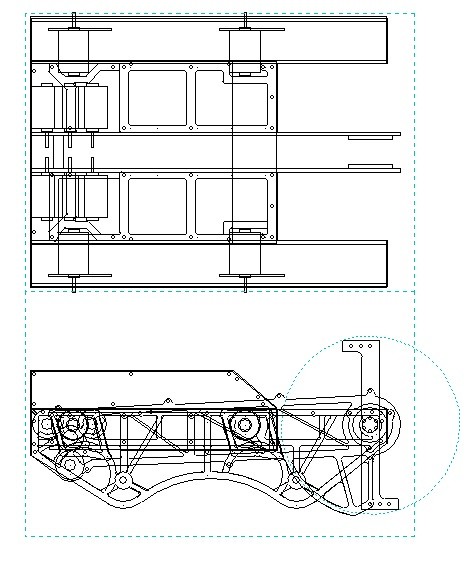
縦回転アーム時の設計図
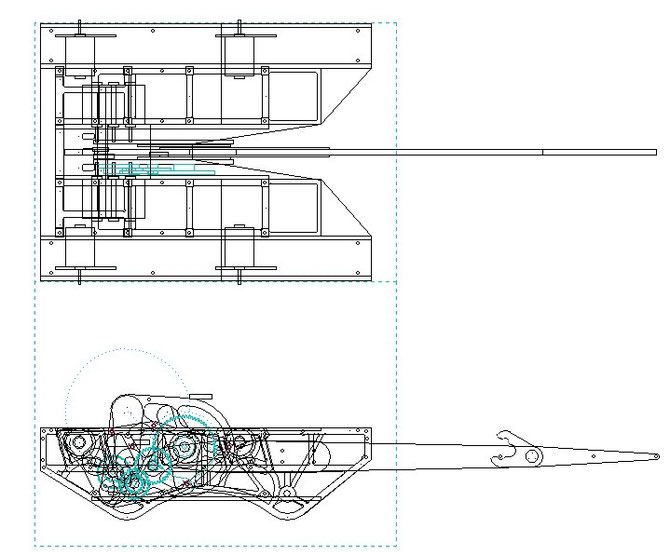
ロッドアーム時の設計図
脚機構
脚機構は120度位相のヘッケンリンクで,減速比はおおよそ21:1
マブチ380モーターを4つ使用し,それらをLi-Feバッテリー(13.2V,2200mA)で駆動することにより非常に高い機動力を発揮する…はずだった
脚機構にはNCフライス盤で自作したギアを使用していたが,問題点が多かった.ピニオンギアの精度が悪く、上手く圧入できず外れることがあり,騒音もひどく伝達ロスが多いためかそれほどスピードが出なかった
また,脚自体も小さく,サスペンション等も無いので走破性も低かった
アーム機構
本来縦回転アームユニットが載るはずだったスペースをそのまま4節リンク機構のロッド/シールドアームに載せ替えた.そのため使用するモーターの数も縦回転アーム時と同様に6個になっている.減速比はおよそ96:1 これを脚機構と同様に13.2Vで駆動することで非常に高い攻撃力を発揮する…実際発揮した でもやっぱり問題続出なんやな 悲劇やな
縦回転アーム時の減速比は6:1であったため減速機構に使うスペースが小さく、ユニット自体も薄型であった.そこに4節リンクアームと減速機構を詰め込んだため,減速機構の最終ギアはモジュール2,厚さ3mmであった.そのため,数回相手の機体を持ち上げただけでギアが欠けたり削れたりした.
電装
バッテリーはタミヤのLi-Feバッテリーを2本直列で使用
ESCはオークションサイトで購入した最高16V対応のメーカー不明のもの.とても安い(購入時は一個およそ2000円)
戦績
ROBOT WARS 2015 in 未来館 2回戦敗退
2015年かわロボ 予選トーナメント1回戦敗退,敗者復活戦1回戦敗退

アイエエエ!回転アーム!?回転アームナンデ!?
「天霧は精研で生まれました。市販品じゃありません、我が部のオリジナルです。
しばし遅れをとりましたが、今や巻き返しの時です。」
「天霧は好きだ」
「天霧がお好き? けっこう。ではますます好きになりますよ。さぁさぁ、どうぞ。天霧のニューモデルです。
……快適でしょ? んああぁ、仰らないで。
フレームがポリカ。でもアルミなんて見かけだけで、重たいし、よく手を切るわ、すぐ変形するわ、ろくなことはない。
モーターもたっぷりありますよ。どんな悪路でも大丈夫。どうぞ回してみてください。
……いい音でしょう? 余裕の音だ、馬力が違いますよ」
「一番気に入ってるのは……」
「何です?」
「……値段だ」
「わーっ、何を! わぁ、待って! ここで動かしちゃ駄目ですよ、待って! 止まれ! うわーっ!!」